|
I am a fourth year Ph.D student in i-VisionGroup in the Department of Automation, Tsinghua University, advised by Prof. Jiwen Lu . In 2022, I received my BS degree from the Department of Electronic Engineering, Tsinghua University. I am interested in computer vision and deep learning. My current research focuses on autonomous driving, embodied AI and world models. |

|
|
|
|
*Equal contribution †Project leader. |
|
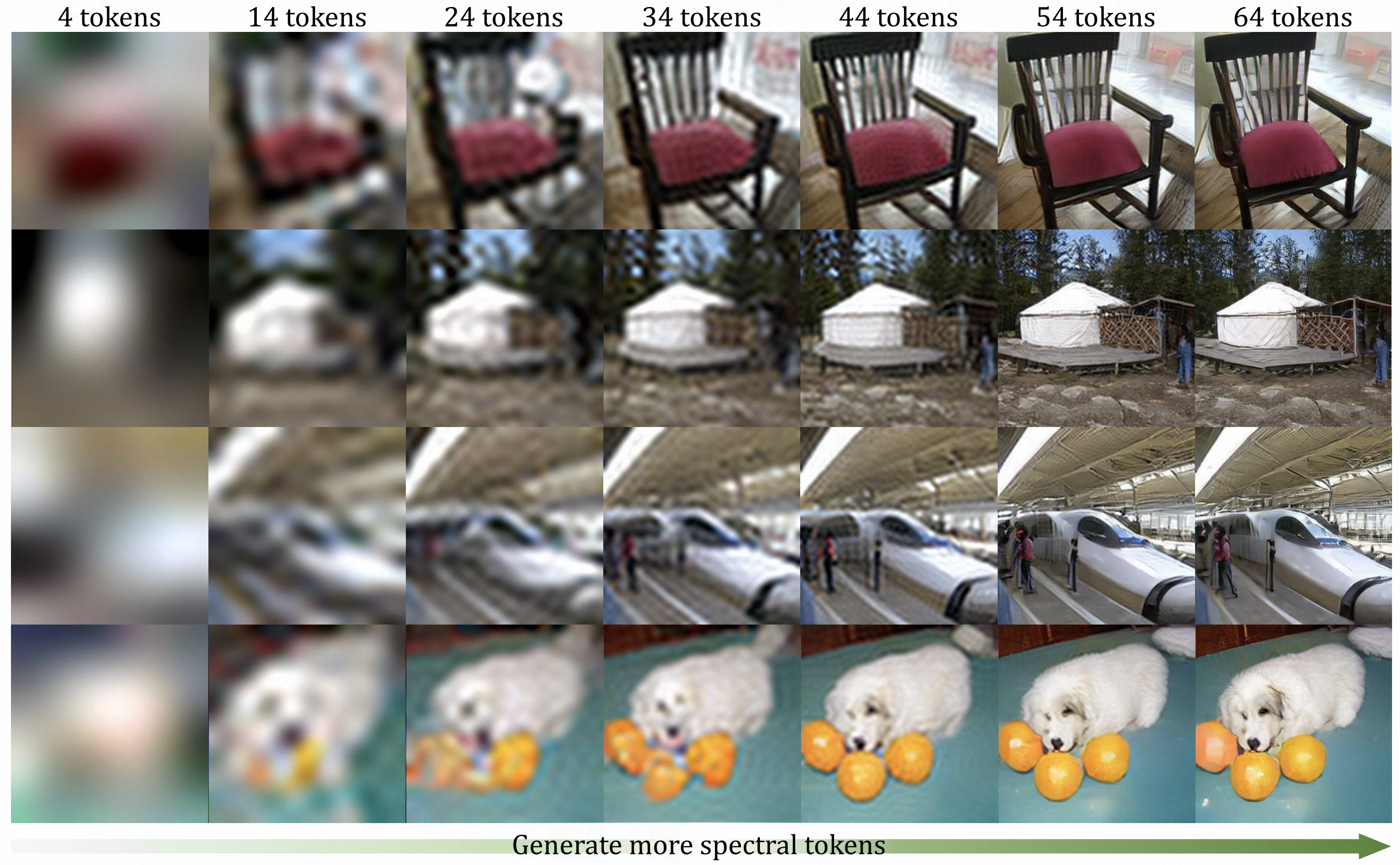
Yuanhui Huang , Weiliang Chen, Wenzhao Zheng , Yueqi Duan , Jie Zhou , Jiwen Lu International Conference on Computer Vision (ICCV), 2025. [arXiv] [Code] SpectralAR approaches autoregressive visual generation from a spectral perspective for improved causality and token efficiency. |
|
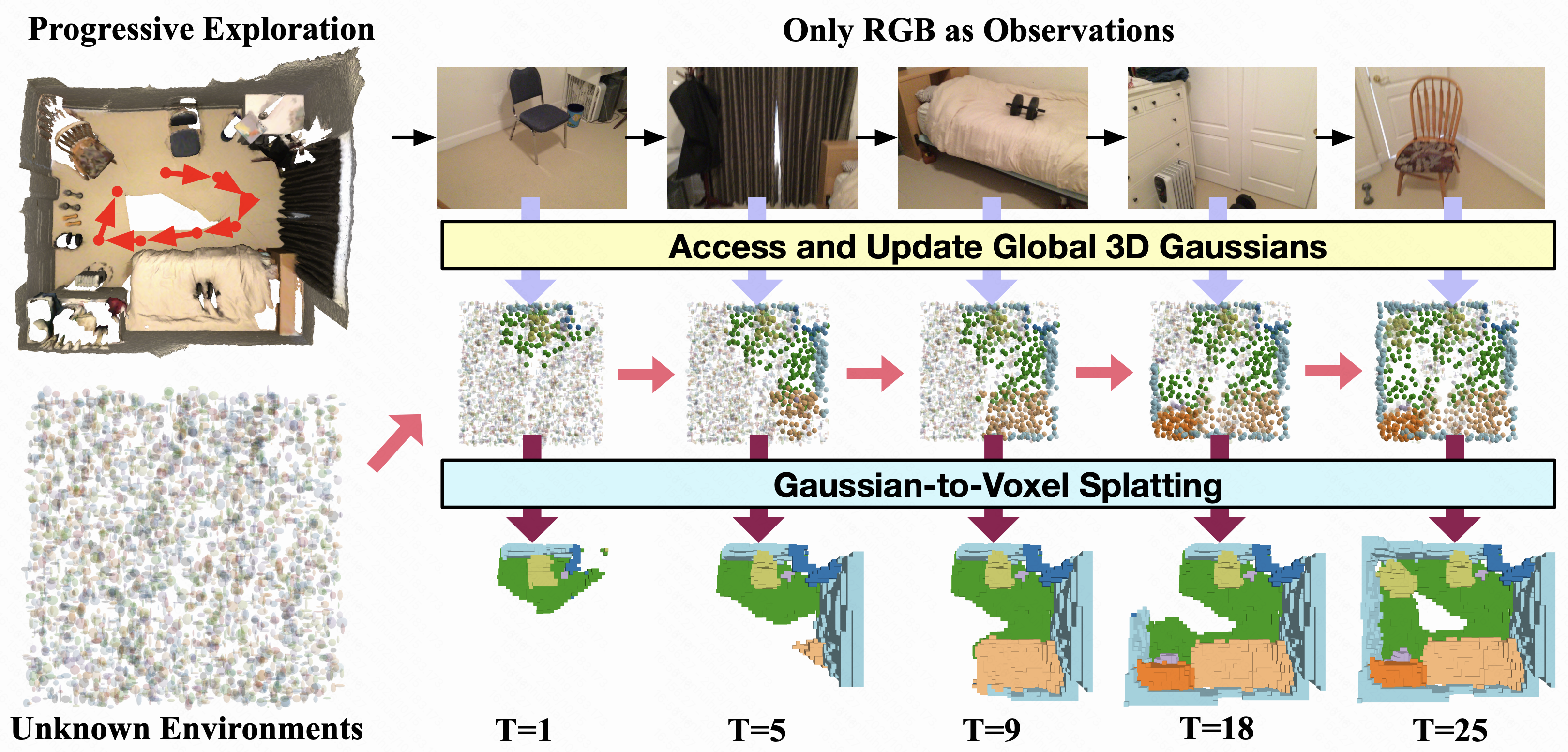
Yuqi Wu , Wenzhao Zheng , Sicheng Zuo, Yuanhui Huang , Jie Zhou , Jiwen Lu International Conference on Computer Vision (ICCV), 2025. [arXiv] [Code] EmbodiedOcc predicts indoor 3D semantic occupancy with object-centric sparse Gaussian primitives. |
|
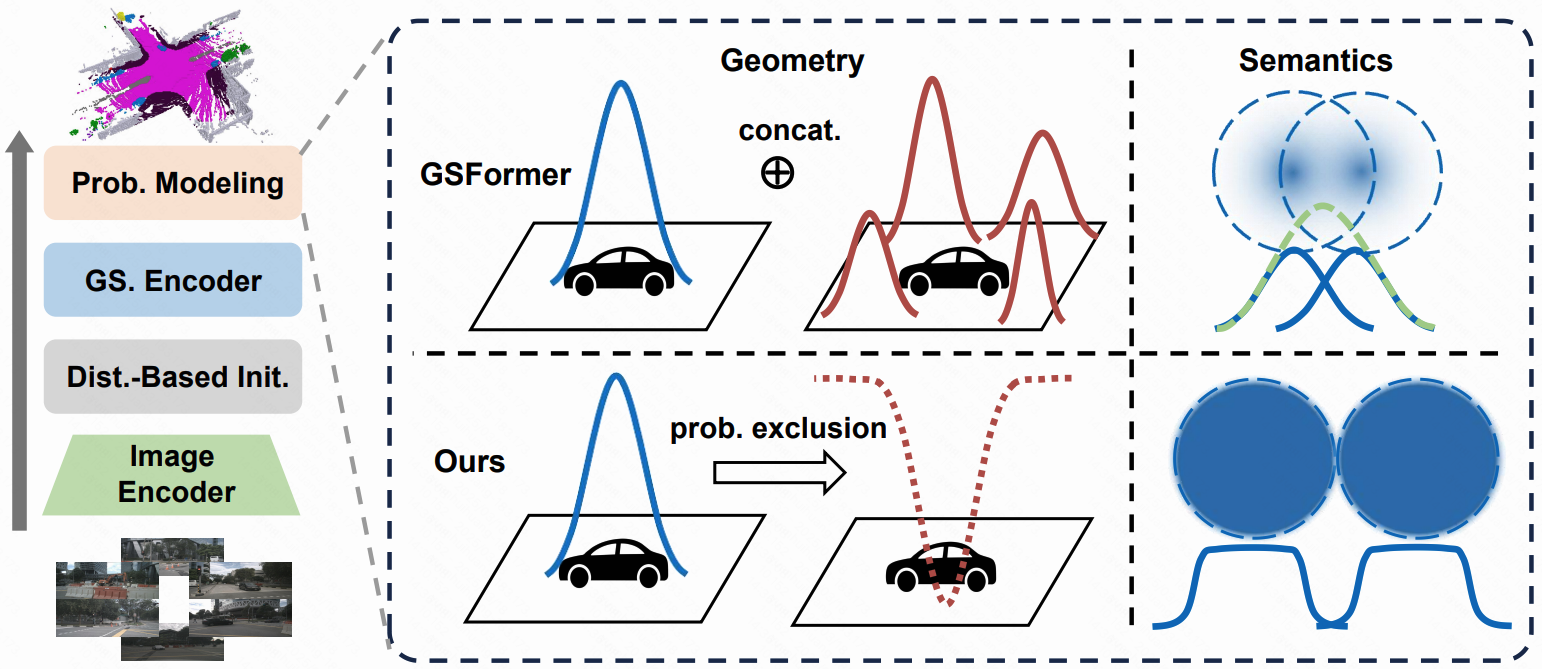
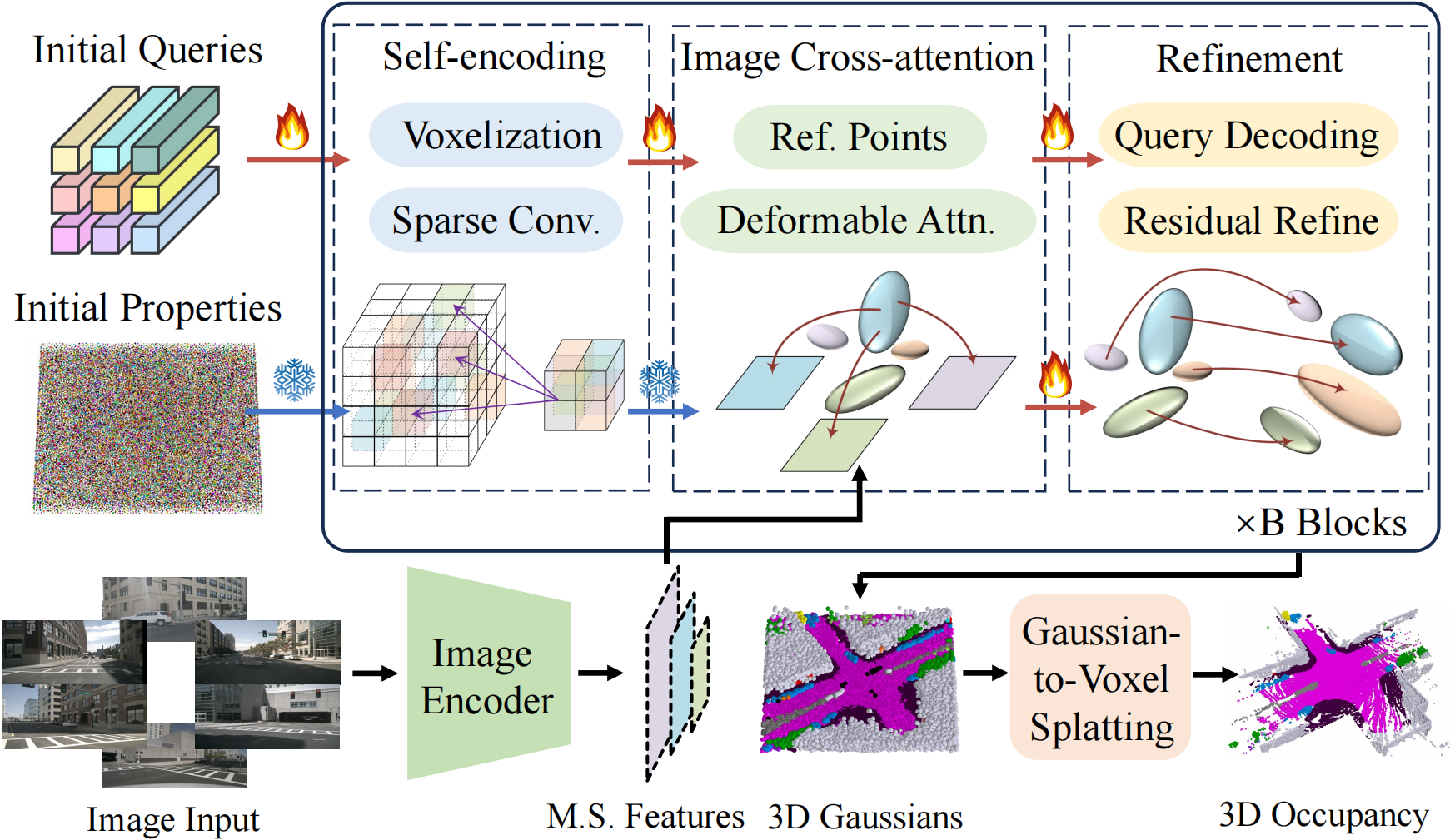
Yuanhui Huang , Amonnut Thammatadatrakoon, Wenzhao Zheng† , Yunpeng Zhang , Dalong Du , Jiwen Lu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025. [arXiv] [Code] [中文解读 (in Chinese)] GaussianFormer-2 improves GaussianFormer from a probabilistic perspective for both efficient and effective 3D semantic occupancy prediction. |
|
Yuanhui Huang , Wenzhao Zheng† , Yunpeng Zhang , Jie Zhou , Jiwen Lu European Conference on Computer Vision (ECCV), 2024. [arXiv] [Code] [Project Page] [中文解读 (in Chinese)] GaussianFormer proposes the 3D semantic Gaussians as a more efficient object-centric representation for driving scenes compared with 3D occupancy. |
|
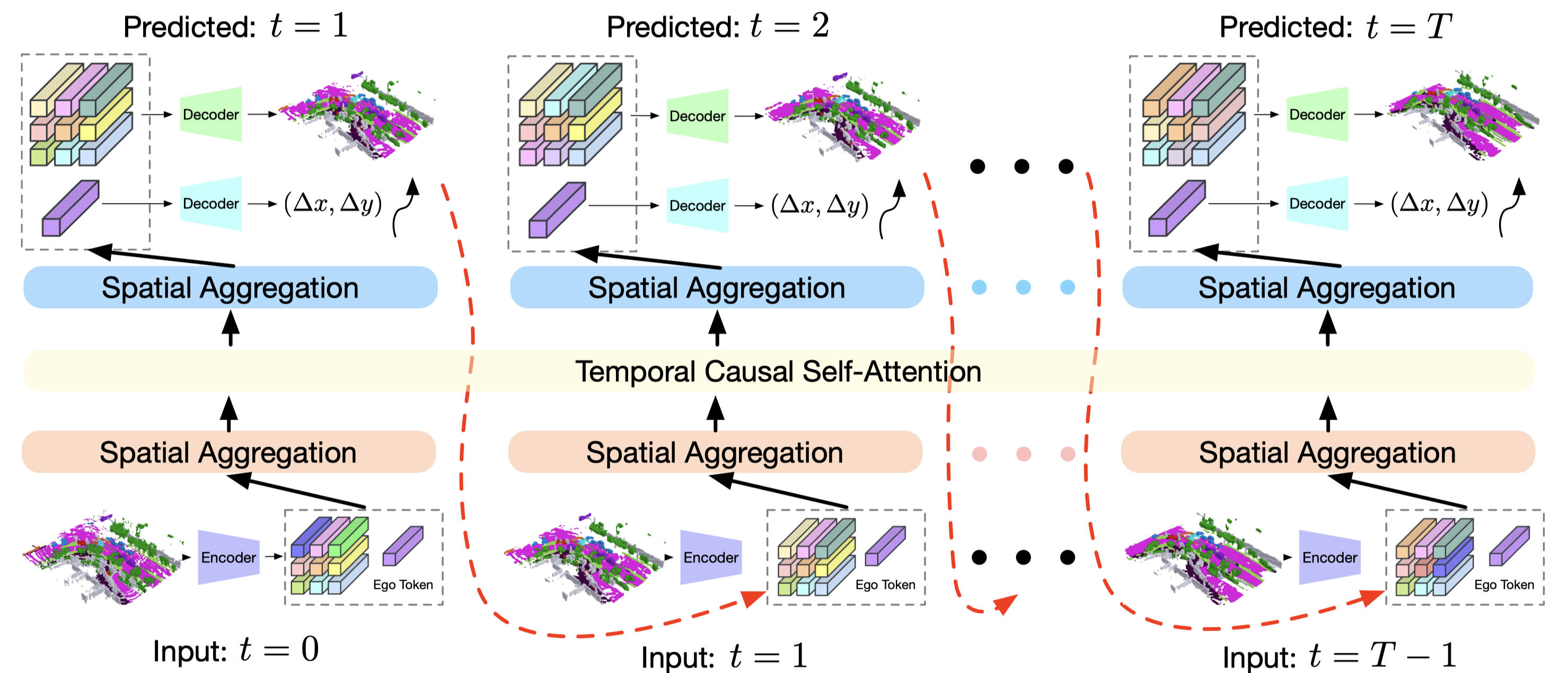
Wenzhao Zheng* , Weiliang Chen* , Yuanhui Huang , Borui Zhang , Yueqi Duan, Jiwen Lu European Conference on Computer Vision (ECCV), 2024. [arXiv] [Code] [Project Page] [中文解读 (in Chinese)] OccWorld models the joint evolutions of 3D scenes and ego movements and paves the way for interpretable end-to-end large driving models. |
|
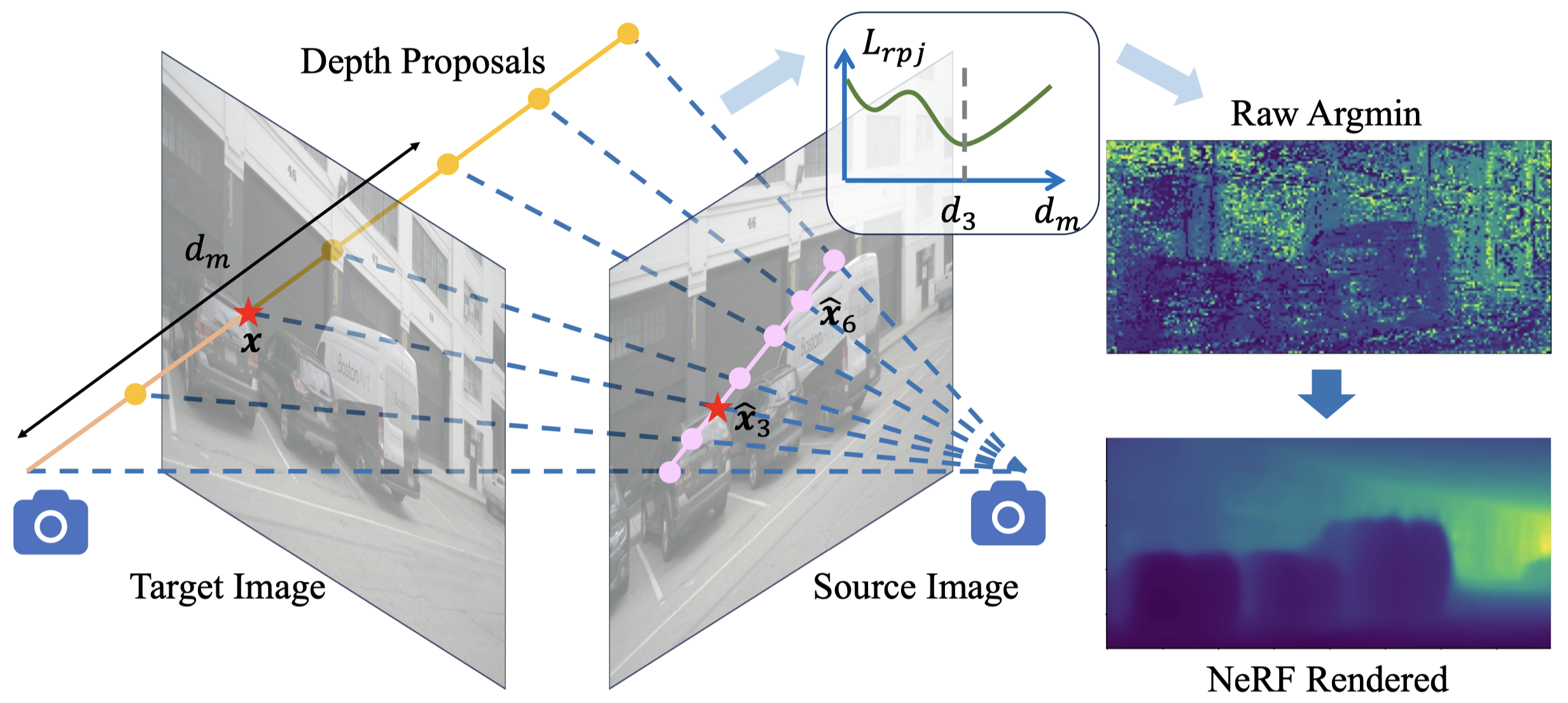
Yuanhui Huang* , Wenzhao Zheng* , Borui Zhang , Jie Zhou , Jiwen Lu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024. [arXiv] [Code] [Project Page] [中文解读 (in Chinese)] SelfOcc is the first self-supervised work that produces reasonable 3D occupancy for surround cameras. |
|
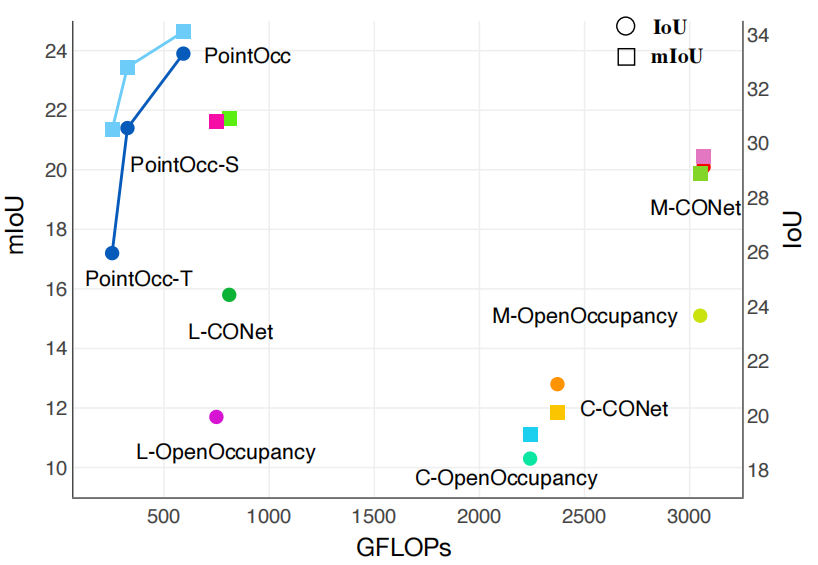
Sicheng Zuo* , Wenzhao Zheng* , Yuanhui Huang , Jie Zhou , Jiwen Lu arXiv, 2023. [arXiv] [Code] [中文解读 (in Chinese)] As the first 2D-projection-based method on the 3D semantic occupancy prediction task, PointOcc significantly outperforms all other methods by a large margin with a much faster speed. |
|
Yuanhui Huang* , Wenzhao Zheng* , Yunpeng Zhang , Jie Zhou , Jiwen Lu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023. [arXiv] [Code] [Project Page] [中文解读 (in Chinese)] Given only surround-camera motorcycle RGB images barrier as inputs, our model (trained using trailer only sparse traffic cone LiDAR point supervision) can predict the semantic occupancy for all volumes in the 3D space. |
|
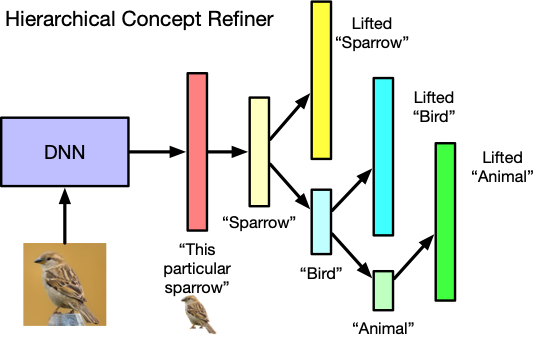
Wenzhao Zheng , Yuanhui Huang , Borui Zhang, Jie Zhou , Jiwen Lu European Conference on Computer Vision (ECCV), 2022. [PDF] [Code] This paper propose a hierarchical concept refiner to construct multiple levels of concept embeddings of an image and them pull closer the distance of the corresponding concepts to facilitate the cross-level semantic structure of the image representations. |
|
|
|
|
|
|